BATSWEB Home > Scienza e Cultura > Fisica del Bats > Meccanica > Cinematica > Moto circolare
Nel moto circolare uniforme l'angolo θ varia con velocitÁ angolare ω = dθ/dt costante, e quindi la traiettoria percorsa Ò una circonferenza di raggio R. Vale la relazione: θ = ωt + θ0, e se il moto inizia dal semiasse positivo l'angolo Ò dato da:
![]()
Il tempo impiegato per una rotazione completa Ò detto periodo, mentre la frequenza Ò definita come il numero di rotazioni nell'unitÁ di tempo. Il periodo T e la frequenza ν sono tra loro inversi e dipendono dalla velocitÁ angolare:
![]()
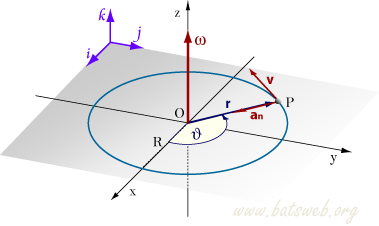
Se l'orbita giace sul piano definito dai versori i e j e l'angolo Ò misurato dalla direzione di i in senso antiorario, il vettore posizione di P Ò dato da:
|
r(t) = ( R cos ω t ) i + ( R sin ω t ) j La velocitÁ angolare Ò un vettore costante dato da: ω = ω k La velocitÁ e l'accelerazione lineari sono dati da:
|
 |
Quindi nel moto circolare uniforme la velocitÁ lineare ha modulo costante e ha sempre direzione tangenziale alla circonferenza; anche l'accelerazione Ò costante, ma ha sempre direzione radiale centripeta.
Tabella delle relazioni che intercorrono tra alcune grandezze cinematiche in un moto circolare uniforme accelerato date le condizioni iniziali θ=0 per t = 0:
| grandezze conosciute | grandezze incognite | |
|---|---|---|
| ω R | v = ω R | a = ωý R |
| ω v | R = v / ω | a = ω v |
| ω a | R = a / ωý | v = a / ω |
| R v | ω = v / R | a = vý/ R |
| R a | ωý = a / R | vý= a R |
| v a | ω = a / v | R = vý/ a |
< La cinematica >
| Torna ad inizio Pagina | LA FISICA DEL BATS | Ritorna alla Home Page |